

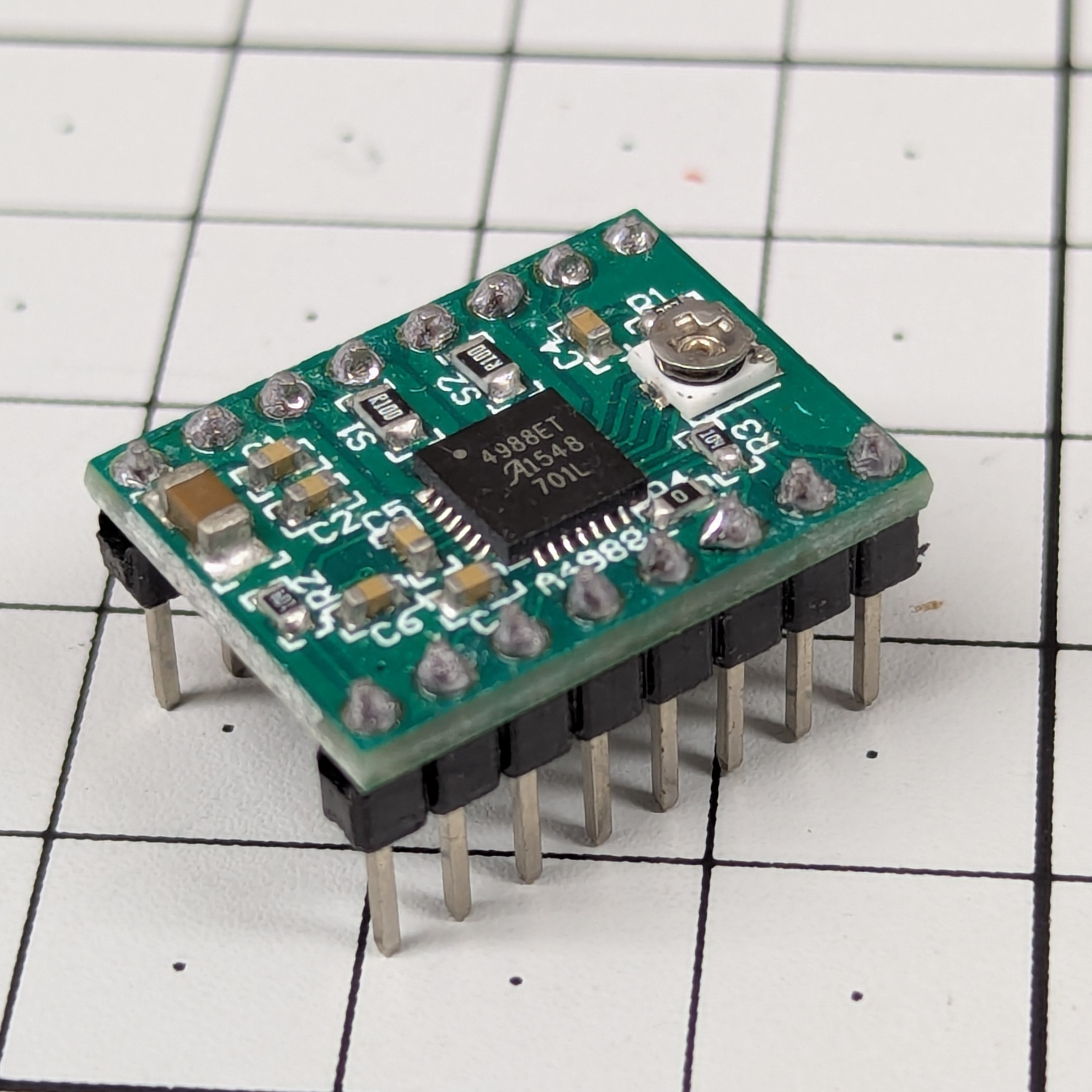
A4988 Stepper Driver


Current Quick Formula.
The A4988 limits per-phase current using the reference voltage (Vref) on the trim pot:
I_max = Vref / (8 × R_SENSE)
- R_SENSE is the value of the little current-sense resistors on the module (look for markings like R050 = 0.05 Ω, R068 = 0.068 Ω, R100 = 0.10 Ω).
- This current is the peak per phase limit (what the driver enforces); choose a target around 70–85% of your motor’s rated phase current for reliability/cooling.
What You Need.
- Multimeter (DC volts, 0–2 V range).
- Small (ideally ceramic) screwdriver.
- Your control board powered with VDD (logic) and VMOT (motor).
Steps (do this once per driver).
- Power the board (VMOT + VDD). It’s fine if motors are connected but never plug/unplug a motor with power on.
- Place black probe on GND, red probe on the metal of the trimpot (or the exposed Vref pad if present).
- Read Vref.
- Adjust: turn the trimpot clockwise to increase, counter-clockwise to decrease (some clones reverse this—watch the meter).
- Set to your target Vref using the tables below.
- Test: run the axis. If you get missed steps, bump Vref a little; if the motor/driver runs hot or noisy, lower it. Add a heatsink/fan if you’re above ~1 A.
Common Targets (Handy Cheat Sheet).
If R_SENSE = 0.05 Ω (R050):
Vref = I × 0.40
0.50 A → 0.20 V
0.80 A → 0.32 V
1.00 A → 0.40 V
1.20 A → 0.48 V
1.50 A → 0.60 V (aggressive; cooling required)
If R_SENSE = 0.068 Ω (R068):
Vref = I × 0.544
0.50 A → 0.27 V
0.80 A → 0.44 V
1.00 A → 0.54 V
1.20 A → 0.65 V
If R_SENSE = 0.10 Ω (R100):
Vref = I × 0.80
0.50 A → 0.40 V
0.80 A → 0.64 V
1.00 A → 0.80 V
1.20 A → 0.96 V
Practical Tips.
- Start modest (e.g., 0.8–1.0 A) and tune up only if you see skipped steps.
- Microstepping doesn’t change the limit you set—it just changes how the current waveform is apportioned—so you still tune to the motor’s phase rating.
- Keep the driver below ~90 °C case temp; if it’s too hot to touch or you get thermal shutdowns, lower Vref or improve cooling.
- For quiet, reliable printing: proper belt tension + reasonable acceleration/jerk often helps more than cranking current.